

23.04.2019 - 05:20
El terme robot humanoide (o simplement humanoide) sol referir-se a aquells robots amb forma semblant a la dels humans. No obstant això, la definició varia segons a qui preguntem: hi ha qui diu que un humanoide hauria de tenir un «cos complet» que incloga dos braços i dues cames, exactament com un humà, però altres se centren més en la comunicació o en la seua capacitat per a realitzar tasques i estenen la definició a un robot mòbil amb rodes que té «la meitat superior del cos», amb un cap, tors i dos braços. Aquest article pretén cobrir la investigació en robòtica humanoide en un sentit ampli per a mostrar les tendències globals d’investigació en aquesta disciplina.
Els humanoides bípedes i la seua història
La definició més restrictiva de robot humanoide indica que es tracta d’un robot bípede actuat amb un tors, braços i un cap, dissenyat per a aconseguir algunes capacitats humanes. Comencem comentant aquest tipus d’humanoide.
«El terme robot humanoide sol referir-se a aquells robots la forma dels quals és semblant a la dels humans»
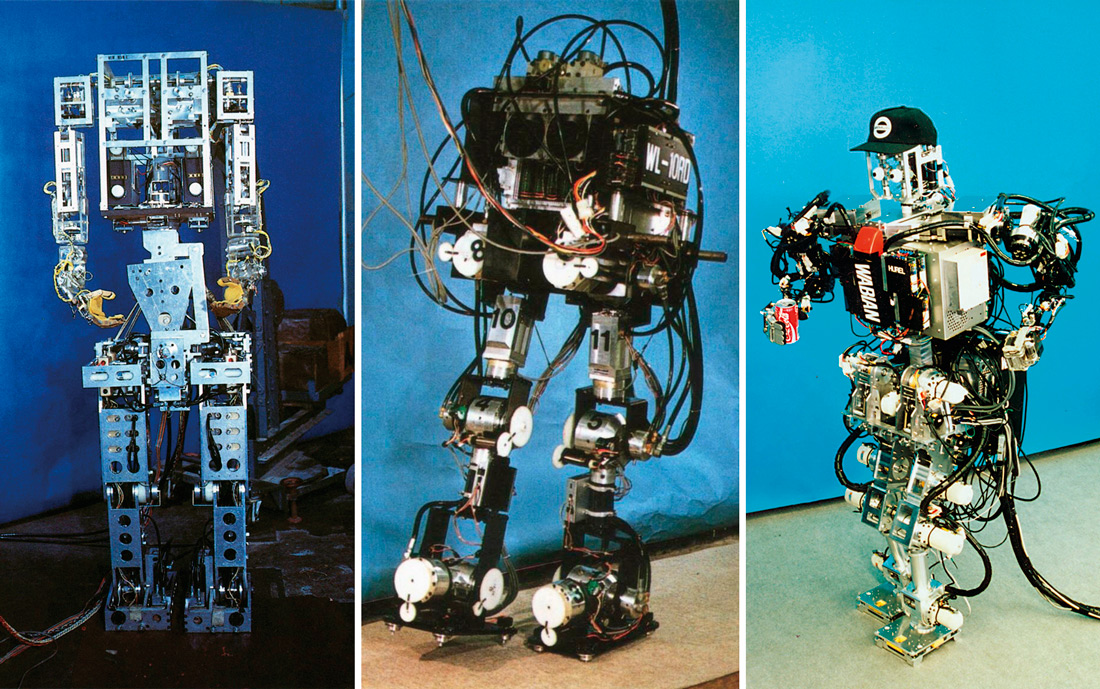
Hi ha un consens sobre el paper capdavanter del Japó en la investigació en robots humanoides fins aproximadament començament del segle xxi, mentre que ara s’estudien en quasi tot el món. El primer humanoide en l’entorn acadèmic va ser el WABOT-1 de Kato (WAseda roBOT-1), que pot caminar, reconèixer un objecte i manipular-lo amb les mans (Kato, Ohteru, Kobayashi, Shirai i Uchiyama, 1973) (Figura 1a). La seua manera de caminar és «quasiestàtica», amb passos estables que sempre mantenen el centre total de la massa dins del polígon de suport format pel contorn del peu (o peus) recolzat en el sòl. Encara que únicament es podia moure lentament, continua resultant sorprenent que pogueren desenvolupar un robot humanoide complet fa més de quaranta anys. En aquells primers anys, a causa principalment de les limitacions tecnològiques, no molta gent creia en els robots humanoides, que continuaven considerant-se ciència-ficció.
Alguns investigadors van continuar treballant en el desplaçament dinàmic dels robots bípedes i alhora amb el desenvolupament del maquinari. Els professors Takanishi i Yamaguchi de la Universitat de Waseda al Japó van desenvolupar la WL (Waseda Leg, “cama de Waseda”) i la sèrie d’humanoides WABIAN (WAseda BIpedal humANoid, “humanoide bípede de Waseda”) (Figures 1b i 1c), amb estabilitat dinàmica en caminar. Els moviments de la meitat superior del cos es controlen mitjançant el concepte de punt de moment zero (Vukobratovic i Borovac, 2004), que es pot entendre com la versió dinàmica del centre de massa. Això és especialment útil durant els moviments dinàmics ràpids, ja que el robot no caurà sempre que el punt de moment zero es quede dins del polígon de suport, encara que el centre de massa se n’isca.
Mentrestant, en 1986, Honda R&D va llançar un projecte secret de robots humanoides i en 1996 va donar a conèixer el robot humanoide P2 (Prototype 2), resultat de deu anys d’investigació. P2 és un humanoide autònom d’1,82 m d’alçada i 210 kg capaç de caminar per control remot sense fil, pujar i baixar escales i espentar un carro. La seua sobtada aparició va causar sorpresa i commoció entre molts investigadors, però va tenir un efecte positiu, ja que va impulsar la investigació en humanoides per a aplicacions realistes i va mostrar que els humanoides ja no eren ciència-ficció.
Poc després, al Japó va començar un projecte nacional denominat HRP (Humanoid Research Project) amb l’ajuda de Honda i altres empreses per a desenvolupar robots humanoides que pogueren coexistir en la societat humana i col·laborar amb els humans. Honda va continuar millorant els seus robots humanoides: va crear el seu Prototype 3 i, finalment, ASIMO (Advanced Step in Innovative MObility, “pas avançat en mobilitat innovadora”) que pot saltar i córrer, servir te, i carregar la seua pròpia bateria (Figura 3). El projecte HRP va acabar en 2003 amb l’HRP-2 (Figura 4a) com a resultat del seu desenvolupament de maquinari. Durant aquest temps, es va establir la generació de patrons de pas bípedes. L’equip de Shuuji Kajita va aplicar el control de previsualització o control predictiu per model per a computar els passos a partir de la trajectòria del punt de moment zero desitjat, derivada dels passos desitjats i basada en un model lineal simplificat de pèndol invertit (Kajita, Hirukawa, Harada i Yokoi, 2014; Kajita et al., 2003). Com a resultat, el control de previsualització permet calcular la velocitat del centre de massa en temps real tenint en compte la progressió futura del punt de moment zero mitjançant el model de control predictiu, la qual cosa es tradueix en moviments suaus en caminar. Aquest mètode es basa en una tècnica d’optimització (Wieber, 2008) que limita el punt de moment zero a una àrea determinada dins polígon de suport. Encara que el model lineal de pèndol invertit és bastant simple, s’ha demostrat que es pot generar un patró pràctic de pas dinàmic mitjançant un sistema de control predictiu, un dels mètodes estàndard per a generar locomoció bípeda.
Llig l’article sencer al web de Mètode
Eiichi Yoshida, codirector del Laboratori de Robòtica Conjunt (JRL, per
les seues sigles en anglès) del CNRS (França) i de l’Institut Nacional de
Ciència i Tecnologia Industrial Avançada (Japó) des de 2009. Des de 2015,
també és subdirector de l’Institut d’Investigació de Sistemes Intel·ligents
(Tsukuba, Japó).
